The Mars Lander Problem
I was recently introduced to a clever coding problem called The Mars Lander - Episode 2 and found it a fun application of some basic control theory.
The Problem
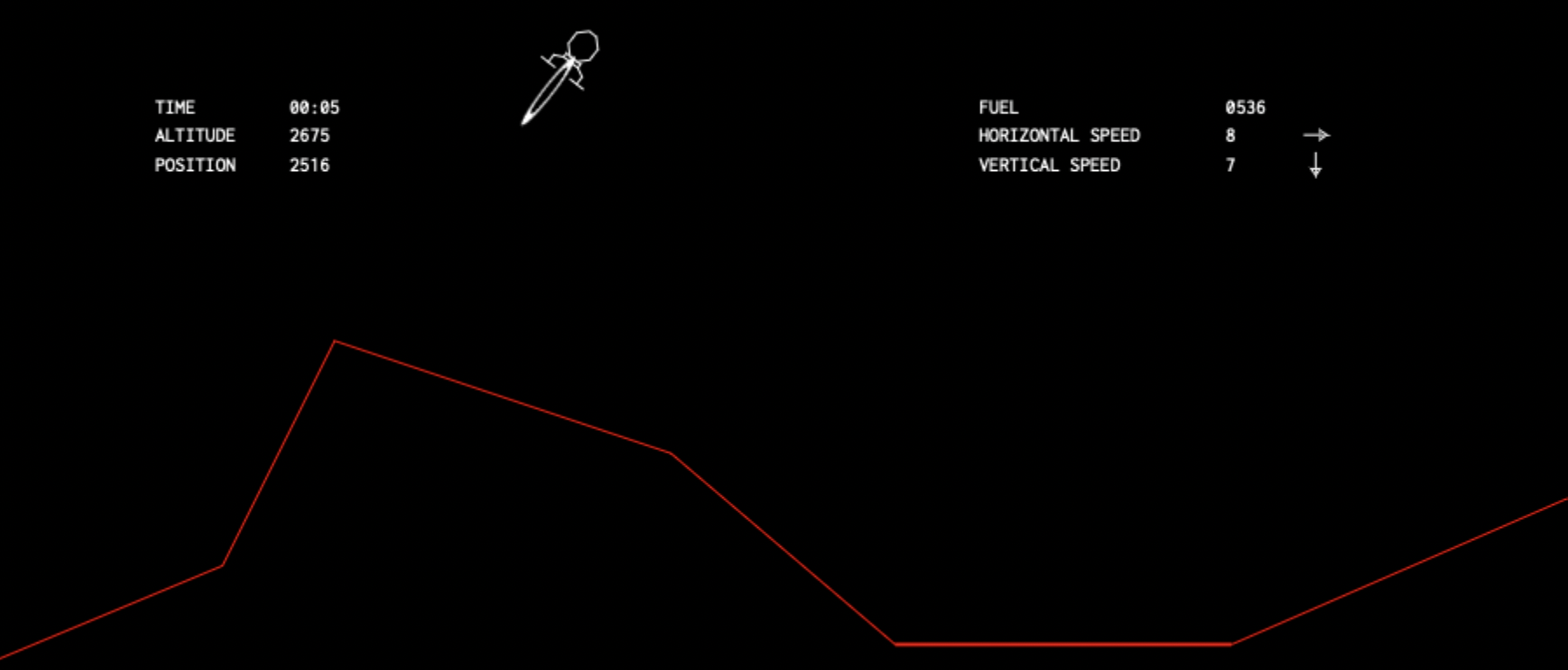
A simplified 2-D space craft is trying to land autonomously on Mars. Controlling the angle and thrust of the aircraft, you need to write an algorithm that can land on level ground within certain parameters (speed, angle, etc) before running out of fuel.
You are presented with a game loop that spits out state information to stdin, and then expects a response to stdout for the next iteration.
A Solution
If you want to try out my solution I’ve saved a gist located here
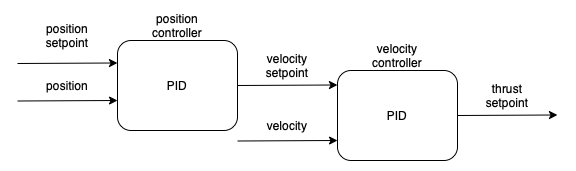
Here’s how I solved the problem. The general flight control is 2 cascaded proportional controllers to control horizontal position and velocity, and then a single proportional controller to control vertical velocity.
What’s a cascaded proportional controller?
First, let’s discuss a controller - in this case a PID controller. PID stands for “Proportional, Integral, and Derivative” and is at the core keeping many industrial and commercial systems at a desired setpoint. The P (Proportional) term means that setpoint error is multiplied by a scalar “proportional gain” to generate the controller output. There are lots of scientific methods to calculate valid gains that ensure stability but in this example we’re just going to manually tune the system to get some reasonable outputs.
The “integral” and “derivative” terms can be used to dial in smoother performance but I’m not going to use those terms for now, so really I’m just using a P controller.
“Cascaded” means we’re taking the output of one controller and feeding that into a second controller as a setpoint. So from our position and position setpoint we calculate a position error, multiple that position error by the proportional gain to get a velocity setpoint and feeding that velocity setpoint into a second velocity controller to get a thrust.
Finding the Landing Zone
The first challenge is to find the landing zone. The 2-D terrain points are first sent to stdout before the game loop starts, so we can read in those x, y coordinates and then parse them. The landing zone will be the flat part, where two successive coordinates have the same y value. In addition to the coordinates we also want the “radius” of the landing zone - I know its 2-D so really its just half the width of the flat portion.
I used a std::pair<double, double> to store the (x, y) coordinates of the center of the landing zone. Using typedef to keep the verbosity down.
typedef std::pair<double, double> CoordXY;I also define a landing_setpoint_t type so I can pass the landing center coordinate and radius to the controller.
typedef struct /_landing_setpoint {
CoordXY landing_coordinate;
double landing_radius;
} landing_setpoint_t;So now I am ready to read the surface coordinates from stdin. I’ll use a std::vector
Some of this is boilerplate given by the challenge template, but you can see packing the coordinates into the CoordXY typedef and then pushing it onto our vector:
std::vector<CoordXY> surface_coordinates_xy;
std::cin >> surface_n; std::cin.ignore();
for (int i = 0; i < surface_n; i++) {
double land_x; // X coordinate of a surface point. (0 to 6999)
double land_y; // Y coordinate of a surface point. By linking all the points together in a sequential fashion, you form the surface of Mars.
std::cin >> land_x >> land_y; std::cin.ignore();
surface_coordinates_xy.push_back(CoordXY(land_x, land_y));
}Now I’ll need a function that can handle that surface vector and return the landing zone along with its radius.
Controlling Position
Ensuring Feasible Control
Here’s the replay of the solution in action
void foo(int a);
foo(1);
// prints